控車床主軸定位上的應(yīng)用")
一.概述
加工工件或加工刀具、夾具在每次加工結(jié)束后,必須處于規(guī)定的方位上時就要使用主軸定位機(jī)構(gòu)。傳統(tǒng)的主軸自動定位機(jī)構(gòu)常采用電氣減速機(jī)械定位方式,即主軸在加工結(jié)束后先制動停止,再設(shè)法使主軸慢轉(zhuǎn)讓機(jī)械設(shè)備(如定位鉤機(jī)構(gòu))來準(zhǔn)確定位。主軸制動過程的速度通常處于失控狀態(tài)且有可能帶來較大的電流沖擊,其慢轉(zhuǎn)一般工作在“半制動”狀態(tài)(通常為同時通以交、直流電)或增加使用定位電機(jī)。這樣雖然也能實現(xiàn)主軸定位,但使電機(jī)工作于較惡劣的情形下或增加了輔助設(shè)備。
隨著變頻調(diào)速技術(shù)在機(jī)械加工設(shè)備中的廣泛應(yīng)用,在主軸使用變頻調(diào)速來實現(xiàn)無級變速的場合,如果主軸具有定位要求則可充分利用變頻調(diào)速的優(yōu)勢方便地實現(xiàn)主軸定位。
二.A510應(yīng)用與主軸定位
1.主要技術(shù)規(guī)格
(1) 編碼器
A:編碼器可選擇線驅(qū)動、開集電極、推挽式;
B編碼器分辨率:開集電集、推挽式編碼器最多允許100KHz的脈沖回饋,以4極電機(jī)(額定轉(zhuǎn)速接近1500rpm)為例,最多允許4000線以下分辨率; 線驅(qū)動:允許規(guī)格為開集電集的3倍,即12000線分辨率以下;
(2)PG回授擴(kuò)展卡規(guī)格
A:開集電集PG-O:內(nèi)置+5V/+12V電源,最高接收/發(fā)送100KHz脈沖信號;
B:線驅(qū)動(差分)PG-L:內(nèi)置+5V/+12V電源,最高接收/發(fā)送300KHz脈沖信號;
C:同步電機(jī)PG-PM:內(nèi)置+5V/+12V電源,最高接收/發(fā)送300KHz脈沖信號;
(3)定位精度
定位誤差+/-1個脈沖以內(nèi),且不存在累計誤差問題。
2.注意事項說明
(1)使用主軸定位/轉(zhuǎn)矩控制功能要求電機(jī)或主軸必須加裝編碼器,編碼器規(guī)格需符合上述要求;
(2)編碼器至PG卡之信號線須使用屏蔽線,屏蔽層可靠接地,編碼器回授信號是主軸定位成功的關(guān)鍵;
(3)變頻器必須配置PG回授擴(kuò)展卡,PG卡共3中型號,請根據(jù)編碼器種類進(jìn)行匹配:JN5-PG-O:開集電極型;JN5-PG-L:線驅(qū)動(差分)型;JN5-PG-PM:同步電機(jī)專用型;如PG卡與編碼器類型不匹配則無法使用。
(4)電機(jī)U、V、W必須與變頻器輸出端U、V、W一一對應(yīng)接線,不可隨意調(diào)換相序,否則電機(jī)會震動且無法使用此功能;
(5)若編碼器與電機(jī)不是一體安裝,例如編碼器安裝于主軸上,需要根據(jù)電機(jī)軸與主軸間的減速比計算出電機(jī)旋轉(zhuǎn)一圈主軸所轉(zhuǎn)動的角度,以此確定變頻器中“編碼器脈波數(shù)”的設(shè)定。例如,減速比1:2,編碼器1024線,則,變頻器中實際設(shè)定的“編碼器脈波數(shù)”應(yīng)為512;同時,以此確定PG輸出齒輪比:20-30,20-31;
(6)變頻器必須使用SV矢量模式,即參數(shù)00-00=3.
3.定位功能主要參數(shù)設(shè)置及配線
(1)馬達(dá)自學(xué)習(xí)
|
參數(shù)代碼 |
建議設(shè)定值 |
參數(shù)說明 |
|
00-00 |
3 |
SV矢量模式 |
|
17-00 |
0或1 |
動態(tài)自學(xué)習(xí) 或 靜態(tài)自學(xué)習(xí) |
|
17-01 |
馬達(dá)銘牌 |
馬達(dá)額定功率 |
|
17-02 |
馬達(dá)銘牌 |
馬達(dá)額定電流 |
|
17-03 |
馬達(dá)銘牌 |
馬達(dá)額定電壓 |
|
17-04 |
馬達(dá)銘牌 |
馬達(dá)額定頻率 |
|
17-05 |
馬達(dá)銘牌 |
馬達(dá)額定轉(zhuǎn)速 |
|
17-06 |
馬達(dá)銘牌 |
馬達(dá)極數(shù) |
|
17-07 |
編碼器規(guī)格 |
編碼器脈波數(shù) |
|
17-08=350 |
低于電源電壓30V |
馬達(dá)無載電壓 |
|
17-09 |
馬達(dá)額定電流的1/3 |
馬達(dá)無載電流(僅靜態(tài)自學(xué)習(xí)需要設(shè)定此參數(shù)) |
|
17-10 |
1 |
自學(xué)習(xí)使能 |
|
17-10設(shè)置為1后,進(jìn)入自學(xué)習(xí)畫面,按面板“RUN”鍵開始自學(xué)習(xí),自學(xué)習(xí)成功后面板顯示“AtEnd”,此時按“DSP”返回。若自學(xué)習(xí)失敗,則顯示“AtErr”,此時需檢查參數(shù)設(shè)置及接線是否無誤。 |
||
(2)其他主要參數(shù)
|
參數(shù)代碼 |
建議設(shè)定值 |
參數(shù)說明 |
|
00-14 |
依需求設(shè)定 |
加速時間 |
|
00-15 |
依需求設(shè)定 |
減速時間 |
|
01-08 |
5Hz |
定位起始頻率 |
|
03-02~04 |
2~4 |
多段速/多點定位之位元 |
|
03-05 |
46 |
S6端子:零伺服功能 |
|
03-06 |
51 |
S7端子:多段速/多點定位切換 |
|
03-07 |
52 |
S8端子:內(nèi)部位置命令使能 |
|
07-09 |
1 |
自由停車 |
|
20-00 |
8左右 |
ASR比例增益1 |
|
20-02 |
8左右 |
ASR比例增益2 |
|
21-09 |
10Hz左右 |
定位最高頻率 |
|
21-42 |
3 |
定位模式:Z相零點定位 |
|
21-43 |
依需求 |
定位偏置脈沖數(shù) |
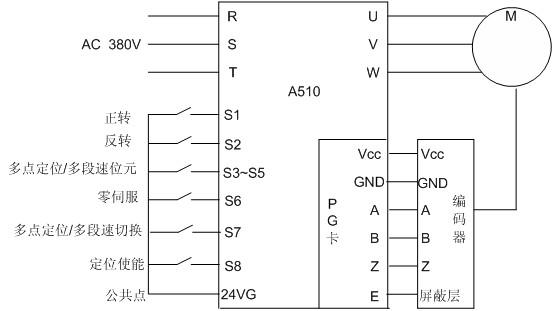
(3)接線圖示例
說明:下圖為使用多點定位功能之接線圖,如僅需要單點定位,則S3~S5,S7,S8均不需接線
4.控制流程
(1) 單獨零伺服---單點定位時:運行狀態(tài)下(S1或S2導(dǎo)通時),導(dǎo)通S6(零伺服)即會開始減速,減速至01-08所設(shè)頻率時進(jìn)入定位模式,并開始尋找Z相原點(定位過程運轉(zhuǎn)速度由21-09設(shè)定),一圈內(nèi)定位完成;
(2) 多點定位時:運行狀態(tài)下(S1或S2導(dǎo)通),同時導(dǎo)通S6(零伺服)、S7(多段速/多點定位切換)、S8(多點定位使能)即會開始減速,減速至01-08所設(shè)頻率時進(jìn)入定位模式,并開始尋找定位點,由S3~S5等多點定位位元按二進(jìn)制方式組合決定定位至第幾個內(nèi)部位置,相應(yīng)的內(nèi)部位置定位圈數(shù)和脈波數(shù)由參數(shù)21-10~21-41決定,最多可定位16個點。
三.結(jié)語
使用A510自帶主軸定位功能的主軸定位控制方法,從實例計算可以看出大大減少了輔助工時,提高了生產(chǎn)效率。同時,減少了定位時的沖擊,提高了定位平穩(wěn)性。實際系統(tǒng)使用、運行結(jié)果表明該方法既滿足了生產(chǎn)工藝要求又簡化了設(shè)備結(jié)構(gòu)及控制過程,方便實用,運行可靠。


發(fā)表評論